




Õppigelaserjoondamistehnikad
Laserkiire joondamise tagamine on joondamise peamine ülesanne. See võib nõuda täiendava optika, näiteks läätsede või kiudkollimaatorite kasutamist, eriti dioodide võikiudlaserallikadEnne laseriga joondamist peate olema tuttav laseriga seotud ohutusprotseduuridega ja veenduma, et teil on kaasas laseriga töötamise ohutusprillid, mis sobivad laseri lainepikkuste blokeerimiseks. Lisaks võib nähtamatute laserite puhul joondamise hõlbustamiseks vaja minna tuvastuskaarte.
Sisselaserjoondus, tuleb kiire nurka ja asendit samaaegselt juhtida. See võib nõuda mitme optika kasutamist, lisada joondusseadete keerukust ja võtta palju töölaual ruumi. Kinemaatiliste kinnitustega saab aga kasutusele võtta lihtsa ja tõhusa lahenduse, eriti ruumipiirangutega rakenduste puhul.
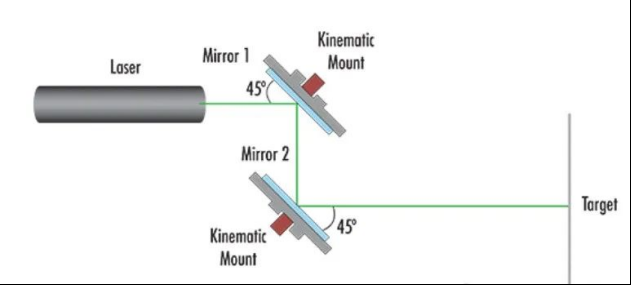
Joonis 1: Paralleelne (Z-volditud) struktuur
Joonis 1 näitab Z-voltimisstruktuuri põhistruktuuri ja nime põhjust. Nurknihke saavutamiseks kasutatakse kahte kinemaatilisele alusele kinnitatud peeglit, mis on paigutatud nii, et langev valguskiir langeb mõlema peegli pinnale sama nurga all. Paigutuse lihtsustamiseks asetage kaks peeglit umbes 45° nurga alla. Selles seadistuses kasutatakse esimest kinemaatilist tuge kiire soovitud vertikaalse ja horisontaalse asendi saavutamiseks, teist tuge aga nurga kompenseerimiseks. Z-voltimisstruktuur on eelistatud meetod mitme laserkiire suunamiseks samale sihtmärgile. Erineva lainepikkusega laserite kombineerimisel võib olla vaja üks või mitu peeglit asendada dikroiliste filtritega.
Joondamise käigus dubleerimise minimeerimiseks saab laserit joondada kahes eraldi võrdluspunktis. Väga kasulikud tööriistad on lihtne sihik või X-iga märgitud valge kaart. Esmalt asetage esimene võrdluspunkt peegli 2 pinnale või selle lähedale, sihtmärgile võimalikult lähedale. Teine võrdluspunkt on sihtmärk ise. Kasutage esimest kinemaatilist statiivi kiire horisontaalse (X) ja vertikaalse (Y) asendi reguleerimiseks esialgses võrdluspunktis nii, et see vastaks sihtmärgi soovitud asendile. Kui see asend on saavutatud, kasutatakse teist kinemaatilist kronsteini nurga nihke reguleerimiseks, suunates laserkiire tegelikule sihtmärgile. Esimest peeglit kasutatakse soovitud joonduse ligikaudseks määramiseks, teist peeglit aga teise võrdluspunkti või sihtmärgi joonduse peenhäälestamiseks.
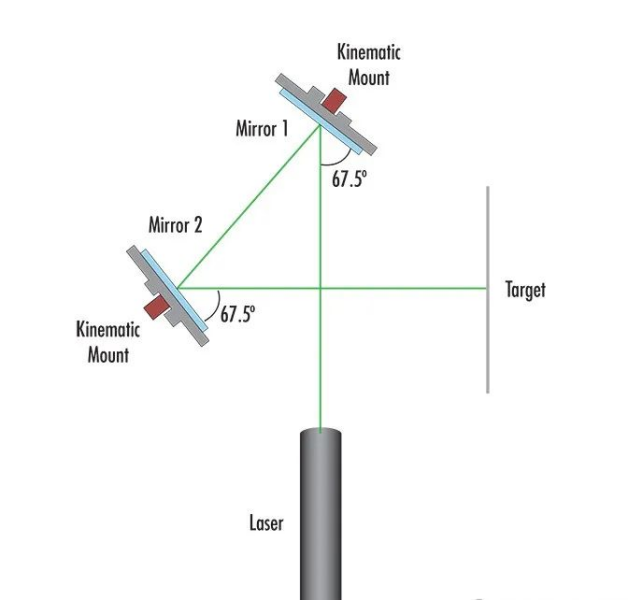
joonis 2: vertikaalne (joonis 4) struktuur
Neljakujuline struktuur on keerukam kui Z-voltimiskonstruktsioon, kuid pakub kompaktsemat süsteemipaigutust. Sarnaselt Z-voltimisstruktuuriga kasutab neljakujuline paigutus kahte liikuvatele kronsteinidele kinnitatud peeglit. Erinevalt Z-voltimisstruktuurist on peegel aga paigaldatud 67,5° nurga all, mis moodustab laserkiirega „4″ kuju (joonis 2). See paigutus võimaldab reflektoril 2 paikneda laserkiire lähteteest eemale. Nagu Z-voltimiskonfiguratsiooni puhul,laserkiirtuleks joondada kahes võrdluspunktis: esimene võrdluspunkt peeglil 2 ja teine sihtmärgil. Esimest kinemaatilist kronsteini rakendatakse laserpunkti nihutamiseks soovitud XY-positsioonile teise peegli pinnal. Teist kinemaatilist kronsteini tuleks seejärel kasutada nurknihke kompenseerimiseks ja sihtmärgi peenhäälestamiseks.
Olenemata sellest, millist kahest konfiguratsioonist kasutatakse, peaks ülaltoodud protseduuri järgimine minimeerima soovitud tulemuse saavutamiseks vajalike iteratsioonide arvu. Õigete tööriistade ja seadmete ning mõne lihtsa näpunäite abil saab laserjoondust oluliselt lihtsustada.
Postituse aeg: 11. märts 2024