




Üksik footonInGaAs fotodetektor
LiDAR-i kiire arenguga onvalguse tuvastamineAutomaatse sõidukite jälgimise pildistamistehnoloogias kasutataval tehnoloogial ja kaugusmõõtmise tehnoloogial on samuti kõrgemad nõuded, traditsioonilises hämaras tuvastamise tehnoloogias kasutatava detektori tundlikkus ja ajaresolutsioon ei suuda tegelikke vajadusi rahuldada. Üksik footon on valguse väikseim energiaühik ja üksikfootoni tuvastamise võimega detektor on hämaras tuvastamise viimane tööriist. Võrreldes InGaAs-iga...APD fotodetektorInGaAs APD fotodetektoril põhinevatel üksikfootonitel on suurem reageerimiskiirus, tundlikkus ja efektiivsus. Seetõttu on nii kodu- kui ka välismaal läbi viidud rida uuringuid IN-GAAS APD fotodetektori üksikfootonitel põhinevate detektorite kohta.
Itaalia Milano ülikooli teadlased töötasid esmakordselt välja kahemõõtmelise mudeli, et simuleerida ühe footoni mööduvat käitumist.laviini fotodetektor1997. aastal ja esitas numbrilise simulatsiooni tulemused ühe footoni laviini fotodetektori siirdeomaduste kohta. Seejärel kasutasid teadlased 2006. aastal MOCVD-d tasapinnalise geomeetrilise ...InGaAs APD fotodetektorüksikfootoni detektor, mis suurendas üksikfootoni tuvastamise efektiivsust 10%-ni, vähendades peegeldavat kihti ja suurendades elektrivälja heterogeensel liidesel. 2014. aastal parandati tsingi difusioonitingimusi ja optimeeriti vertikaalset struktuuri, mille tulemusel saavutati üksikfootoni detektoril kõrgem tuvastamise efektiivsus, kuni 30%, ja saavutati umbes 87 ps ajastusvärin. 2016. aastal integreerisid SANZARO M jt InGaAs APD fotodetektori üksikfootoni detektori monoliitse integreeritud takistiga, konstrueerisid detektoril põhineva kompaktse üksikfootoni loendusmooduli ja pakkusid välja hübriidse summutusmeetodi, mis vähendas oluliselt laviinilaengut, vähendades seeläbi impulsijärgset ja optilist läbikostet ning vähendades ajastusvärinat 70 ps-ni. Samal ajal on ka teised uurimisrühmad läbi viinud uuringuid InGaAs APD kohta.fotodetektorüksikfootoni detektor. Näiteks on Princetoni Lightwave konstrueerinud tasapinnalise struktuuriga InGaAs/InPAPD üksikfootoni detektori ja võtnud selle kommertskasutusse. Shanghai Tehnikafüüsika Instituut testis APD fotodetektori üksikfootoni jõudlust, kasutades tsingi ladestuste eemaldamist ja mahtuvuslikku tasakaalustatud värava impulssrežiimi tumedate osakeste arvuga 3,6 × 10⁻⁴/ns impulsi sagedusel 1,5 MHz. Joseph P jt konstrueerisid mesa struktuuriga InGaAs APD fotodetektori üksikfootoni detektori laiema keelutsooniga ja kasutasid neelava kihi materjalina InGaAsP-d, et saada madalam tumedate osakeste arv, mõjutamata seejuures detekteerimise efektiivsust.
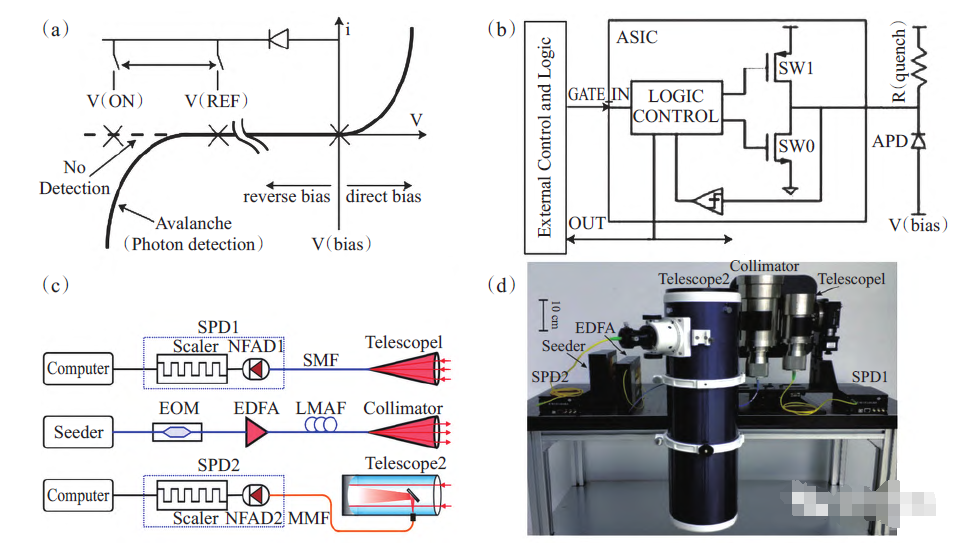
InGaAs APD fotodetektori üksikfootoni detektori töörežiim on vaba töörežiim, see tähendab, et APD fotodetektor peab pärast laviini toimumist välisahela summutama ja pärast teatud aja möödumist kustutusest taastuma. Kustutamise viivitusaja mõju vähendamiseks jaguneb see ligikaudu kahte tüüpi: üks on passiivse või aktiivse kustutusahela kasutamine kustutamise saavutamiseks, näiteks R Thew jne poolt kasutatav aktiivne kustutusahel. Joonistel (a) ja (b) on lihtsustatud diagramm elektroonilisest juhtimis- ja aktiivsest kustutusahelast ning selle ühendusest APD fotodetektoriga, mis on välja töötatud töötama avatud või vabalt töötavas režiimis, vähendades oluliselt seni lahendamata impulsijärgset probleemi. Lisaks on detekteerimise efektiivsus 1550 nm juures 10% ja impulsijärgse tõenäosus väheneb alla 1%. Teine on kiire kustutamise ja taastumise realiseerimine eelpinge taseme juhtimise abil. Kuna see ei sõltu laviiniimpulsi tagasiside juhtimisest, väheneb kustutamise viivitusaeg oluliselt ja detektori detekteerimise efektiivsus paraneb. Näiteks LC Comandar jt kasutavad väravrežiimi. Valmistati InGaAs/InPAPD-l põhinev väravpõhine ühefootoni detektor. Üksikfootoni tuvastamise efektiivsus oli 1550 nm juures üle 55% ja saavutati impulsijärgne tõenäosus 7%. Selle põhjal rajas Hiina Teadus- ja Tehnoloogiaülikool liDAR-süsteemi, mis kasutab mitmemoodilist kiudu, mis on samaaegselt ühendatud vabarežiimi InGaAs APD fotodetektoriga ja ühefootoni detektoriga. Eksperimentaalseadmed on näidatud joonistel (c) ja (d) ning 12 km kõrguste mitmekihiliste pilvede tuvastamine toimub ajaresolutsiooniga 1 s ja ruumilise resolutsiooniga 15 m.
Postituse aeg: 07.05.2024