




Laserkaugkõne tuvastamise signaali analüüs ja töötlemine
Signaalimüra dekodeerimine: signaalianalüüs ja laseriga kaugkõne tuvastamise töötlemine
Tehnoloogia imelises maailmas on laseriga kaugkõne tuvastamine nagu ilus sümfoonia, kuid sellel sümfoonia on ka oma „müra” – signaalimüra. Nagu ootamatult lärmakas publik kontserdil, on müra sageli häiriv.laserkõne tuvastamineAllika kohaselt saab laseriga kaugkõne signaali tuvastamise müra jagada ligikaudu laservibratsiooni mõõtmise instrumendi enda tekitatud müraks, vibratsiooni mõõtmise sihtmärgi lähedal asuvate muude heliallikate tekitatud müraks ja keskkonnahäirete tekitatud müraks. Pikamaa kõne tuvastamine peab lõppkokkuvõttes hankima kõnesignaale, mida suudab ära tunda inimese kuulmine või masinad, ning paljud väliskeskkonnast ja tuvastussüsteemist pärit segamürad vähendavad omandatud kõnesignaalide kuuldavust ja arusaadavust ning nende mürade sagedusriba jaotus langeb osaliselt kokku kõnesignaali peamise sagedusriba jaotusega (umbes 300–3000 Hz). Seda ei saa traditsiooniliste filtritega lihtsalt filtreerida ja tuvastatud kõnesignaale on vaja edasi töödelda. Praegu uurivad teadlased peamiselt mittestatsionaarse lairiba müra ja löögimüra denoiseerimist.
Lairibaühenduse taustmüra töödeldakse üldiselt lühiajalise spektri hindamise meetodi, alamruumi meetodi ja muude signaalitöötlusel põhinevate mürasummutusalgoritmide abil, aga ka traditsiooniliste masinõppe meetodite, süvaõppe meetodite ja muude kõne täiustamise tehnoloogiate abil, et eraldada puhtad kõnesignaalid taustmürast.
Impulssmüra on täpiline müra, mis võib tekkida dünaamilise täpilise efekti tõttu, kui LDV tuvastussüsteemi tuvastusvalgus häirib tuvastussihtmärgi asukohta. Praegu eemaldatakse seda tüüpi müra peamiselt signaali kõrge energiatipu asukoha tuvastamise ja selle ennustatud väärtusega asendamise teel.
Laser-kaughääle tuvastamisel on rakendusvõimalusi paljudes valdkondades, näiteks pealtkuulamine, mitme režiimiga jälgimine, sissetungimise avastamine, otsing ja pääste, lasermikrofon jne. Võib ennustada, et laser-kaughääle tuvastamise tulevased uurimissuunad põhinevad peamiselt (1) süsteemi mõõtmistulemuste, näiteks tundlikkuse ja signaali-müra suhte parandamisel, tuvastusrežiimi, komponentide ja tuvastussüsteemi struktuuri optimeerimisel; (2) signaalitöötlusalgoritmide kohanemisvõime parandamisel, et laser-kõne tuvastamise tehnoloogia saaks kohaneda erinevate mõõtmiskauguste, keskkonnatingimuste ja vibratsiooni mõõtmise sihtmärkidega; (3) vibratsiooni mõõtmise sihtmärkide mõistlikumal valikul ja erinevate sageduskarakteristikutega sihtmärkidel mõõdetud kõnesignaalide kõrgsageduslikul kompenseerimisel; (4) süsteemi struktuuri täiustamisel ja tuvastussüsteemi edasisel optimeerimisel järgmistel eesmärkidel:
miniaturiseerimine, kaasaskantavus ja intelligentne tuvastusprotsess.
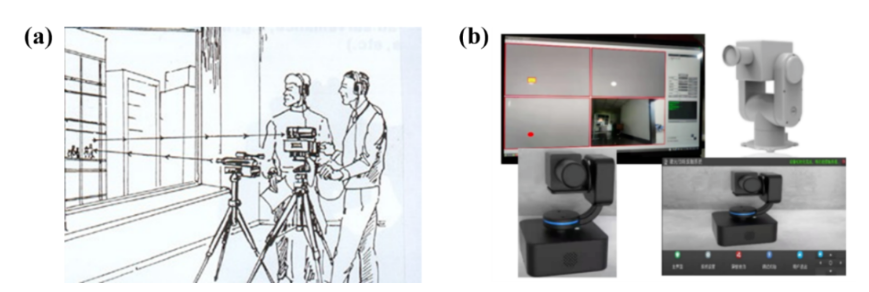
JOONIS 1 (a) Laseri pealtkuulamise skemaatiline diagramm; (b) Laseri pealtkuulamisvastase süsteemi skemaatiline diagramm
Postituse aeg: 14. okt 2024